
posted by : Evan Ackerman / Tue, February 14, 2012
That squishy dollop of brilliance that is the jamming robot gripper has learned a new trick: Roboticists at Cornell and the University of Chicago have taught it to throw stuff.
A quick refresher: The gripper is simply a latex balloon filled with coffee grounds. The grounds move around each other like grains of sand and can conform to objects and complex surfaces, but when air is pumped out of the balloon, the grounds all “jam” together into a solid mass, yielding a strong hold on whatever the gripper is in contact with. It’s simple, it’s cheap, and you can pick up just about anything without having to calculate optimal grasping points or do anything else in the way of sensing or computation: You really just stuff the gripper against an object, pump the air out, and off you go.
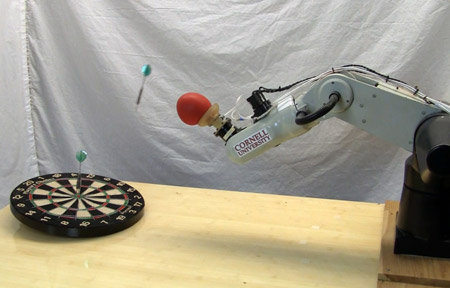
This new “shooting” trick (or “fast ejection,” if you prefer) comes from rapidly re-inflating the gripper with air. It sounds simple enough, but what you don’t expect is the repeatable long-range accuracy, good enough to shoot baskets, sort hardware, and play a better game of darts than I ever have:
The researchers say that the precision they can achieve is ±60 mm with 95 percent confidence in the direction perpendicular to flight, which “is certainly too coarse for high-precision manufacturing tasks but could be useful for tasks like sorting objects into bins in a factory or throwing away trash in a home.” It’s obviously good enough for winning games of mini-basketball and playing horizontal darts, and it’s kinda fun to picture what other tasks a talented throwing robot might do around the house: say, making a sandwich, or unloading the dishwasher, handy stuff like that.
You can get more details in a pre-print edition of the paper (which will appear in IEEE Transactions on Robotics), here.